myCobot is a 6-DOF robotic arm from Elephant Robotics, which owns the highest cost-performance in collaborative robotic arms. This article is about the experience of using the myCobot280-M5Stack. I will program it in python, including environment building, code testing, and, development.
Introduction
Just as its name implies, this robot uses the M5Stack controller. So when using it, we need to build the compiled environment with a computer, and I will be using the python language to do this.
There is an official library named pymycobot, I will use it in python to manipulate the robotic arm.
Environment building
Install the python environment on the computer and download the pymycobot library. Two methods are provided:
- A more detailed tutorial on building the python environment is available on Elephant Robotics Gitbook.
- Search the related tutorials on Google.
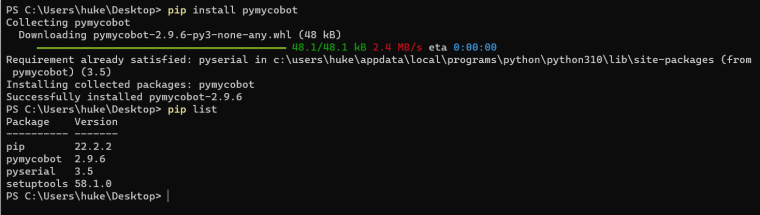
After installing the programming environment, we download the driver library.
pip install pymycobot
Controlling the robotic arm
Get started with importing some python libraries.
from pymycobot.mycobot import MyCobot
import time
(1)MyCobot(port,baud)
To create an object to communicate with the myCobot.
Port: Serial port of the robotic arm.
Baud: Baud rate for the robotic arm.
#The serial port of my arm is COM7, baud rate 115200.
mc = MyCobot('COM7',115200)
(2)get_angles()
To get the angle data of all joints of myCobot.
Return Value: The return value is a list with six elements of data, corresponding to joints 1 to 6.
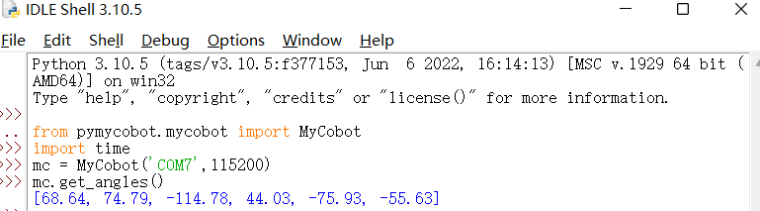
We can see the angles of myCobot as shown

(3)send_angles(degree,speed)
To send the angle and speed of movement to all joints.
Degree: The angles of the joints are in the range of -180 to 180 and are stored in a list in the order of 1 to 6 joints respectively.
Speed: The speed of the robotic arm during its movement to the specified angle.
mc.send_angles([0,0,0,0,0,0],50)
Run like this.
demo
Forum can't put gif
(4)send_angle(id,degree,speed)
To send the angle and speed to a single joint.
Id: Integers in the range 1 to 6. It corresponds to robotic arms with 1-6 axes, respectively.
Degree: The angles of the joints are in the range of -180 to 180 and are stored in a list in the order of 1 to 6 joints respectively.
Speed: The speed of the robotic arm during its movement to the specified angle.
Make a joint's movement reach a position of 90 degrees at a speed of 50.
mc.send_angle(1,90,50)
(5)release_all_servos()
To unlock the robotic arm so it can swing manually at will. Note that when this command is executed, the arm will fall due to gravity, so be careful to prevent it from hitting other things.
mc.release_all_servos()
The robotic arm is powered on when it is controlled, and with this function, we can swing the robotic arm.
demo2
Forum can't put gif
Demo
Write a demo to make myCobot280-M5Stack dance.
#!/usr/bin/python3
#-*- coding: UTF-8 -*-
from pymycobot.mycobot import MyCobot
import time
mc = MyCobot('COM7',115200)
mc.send_angles([0,0,0,0,0,0],50)
time.sleep(1)
for count in range(3):
mc.send_angles([87.8,(-51.5),60.9,11.95,(-15.9),(-6.06)],50)
time.sleep(1)
mc.send_angles([87.97,42.01,(-45.26),10.37,(-15.9),(-6.06)],50)
time.sleep(1)
mc.send_angles([19.77,79.36,(-114.34),39.63,(-15.9),(-6.06)],50)
time.sleep(1)
for count2 in range(4):
mc.send_angles([43.24,93.42,(-140.88),48.07,60.64,(-6.06)],50)
time.sleep(1)
mc.send_angles([19.77,79.36,(-114.34),39.63,(-15.9),(-6.06)],50)
time.sleep(1)
demo3
This is the end of myCobot280-M5Stack first experience.
If you like this article, please give me a like or leave a comment to support it. Thank you!