-
-
Get Z function gives a number increasing constantly, exceeding 1000 over time.
-
Get Y and X functions provide different figures in each start with error of around 10 degrees.
-
Is calibration required or are there any other custom functions providing accurate results.
-
-
@hetzer Yes, It need to be calibrated after device initialization.
-
Is there a custom block for calibration. I like to use uiflow and prefer not to go back to arduino.
-
@hetzer Sorry about that I have asked engineer. He said that we'll not add this calibrated function block.
-
Is it possible to get to gyro code coming with the firmware. I can see the the dafult gyro app is working accurately but all my get x and get y block resulting random numbers
-
@hetzer Are you sure that it is random data?
-
Yes, en each start, while the unit is on the same position I get different values for x and y.
Z starts from zero and just increases in each measurement.I tried to write a code to subtract the initial value from zero to calibrate but next x and y values within loop again starts from random values.
-
Still no solution to this problem, the demo is working flawlessly but get_x, get?y and get_z provide wrong results. Can anyone help?
-
@hetzer Hi, thanks for your feedback, the block naming on IMU is misleading. get-x get-y get-z actually is Yaw, Pitch, Roll.
-
@liushasha said in UI flow IMU issues:
naming on IMU is misleading. get-x get-y get-z actually is Yaw, Pitch, Roll.
I am aware but still the pitch and roll randomly varies around +-10 degrees and the roll value increase over time exceeding 360
-
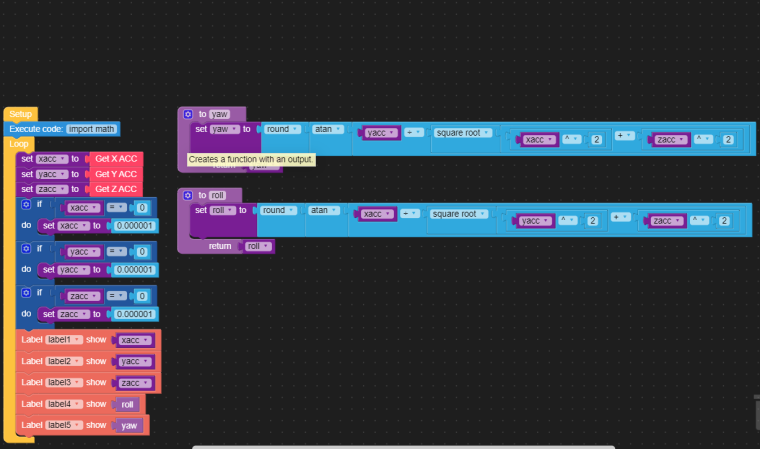
Managed to get some more accurate x and ydegrees.
Is it possible to get yaw heading with uiflow? -
if only use mpu6050,i try fix yaw offset, but Failed .....
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login