Issues building a driving robot with atomic motion base, ToF sensor and 360 servos
-
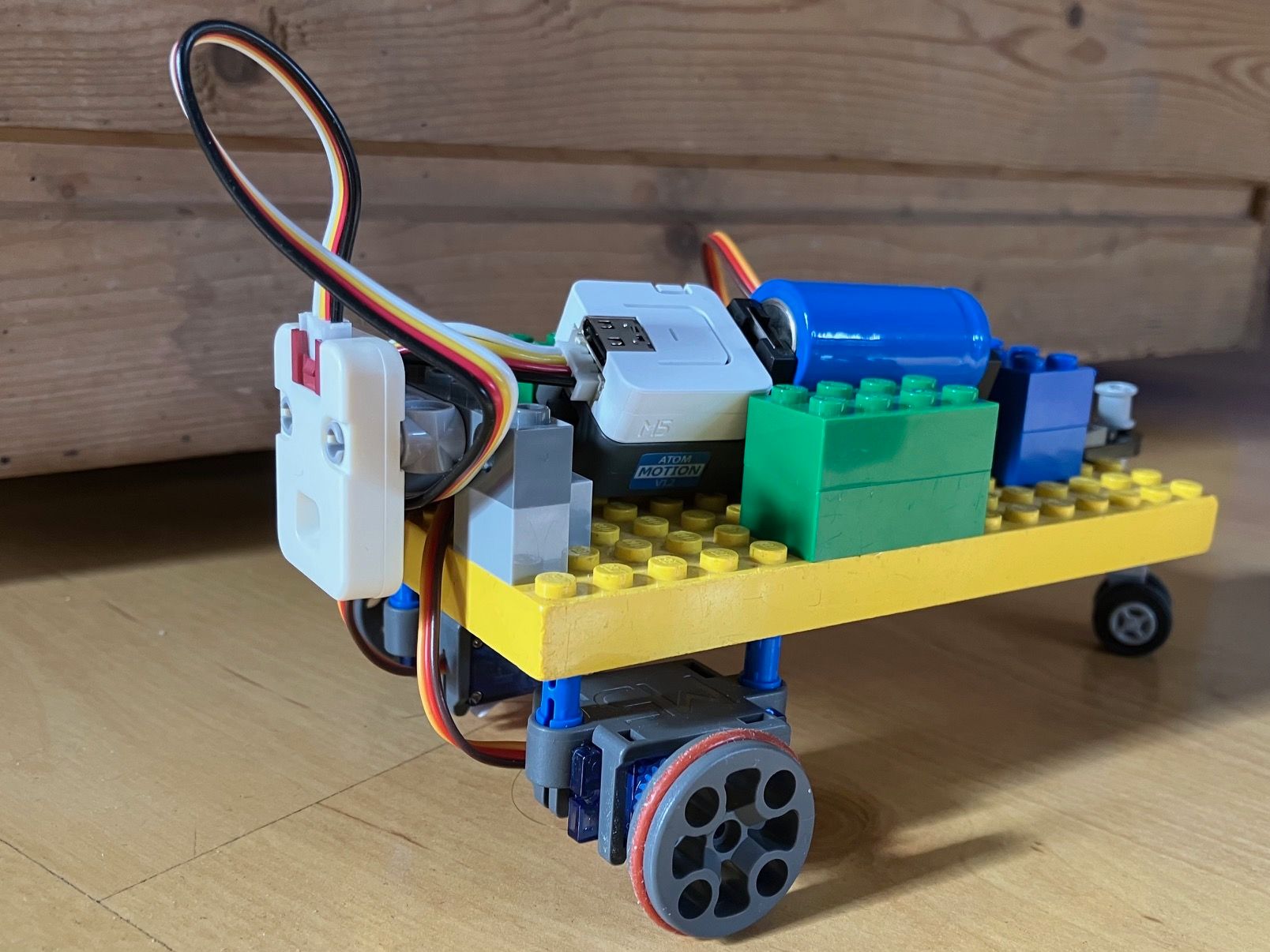
I want to build a driving robot with Atomic Motion Base and 2x 360 servos.
I started with Atom Matrix. After motion base and ToF4M have been added in UIFlow2, it always tells me that I2C is not correctly initialized. I tried chat, it didn't help. Maybe it's an error with the UIFlow defaults for the combination?
Next was AtomS3 Lite, there UIFlow2 just continued to work after adding motion base and ToF4M.
During boot of Atom Matrix and AtomS3 Lite on USB, I often saw an error about "Wrong Password" in the log. It seems the WiFi is connecting, but it's not waiting long enough before trying cloud login. But that's just a guess. Sometimes it works, so a lot of reboots to get to stable state.
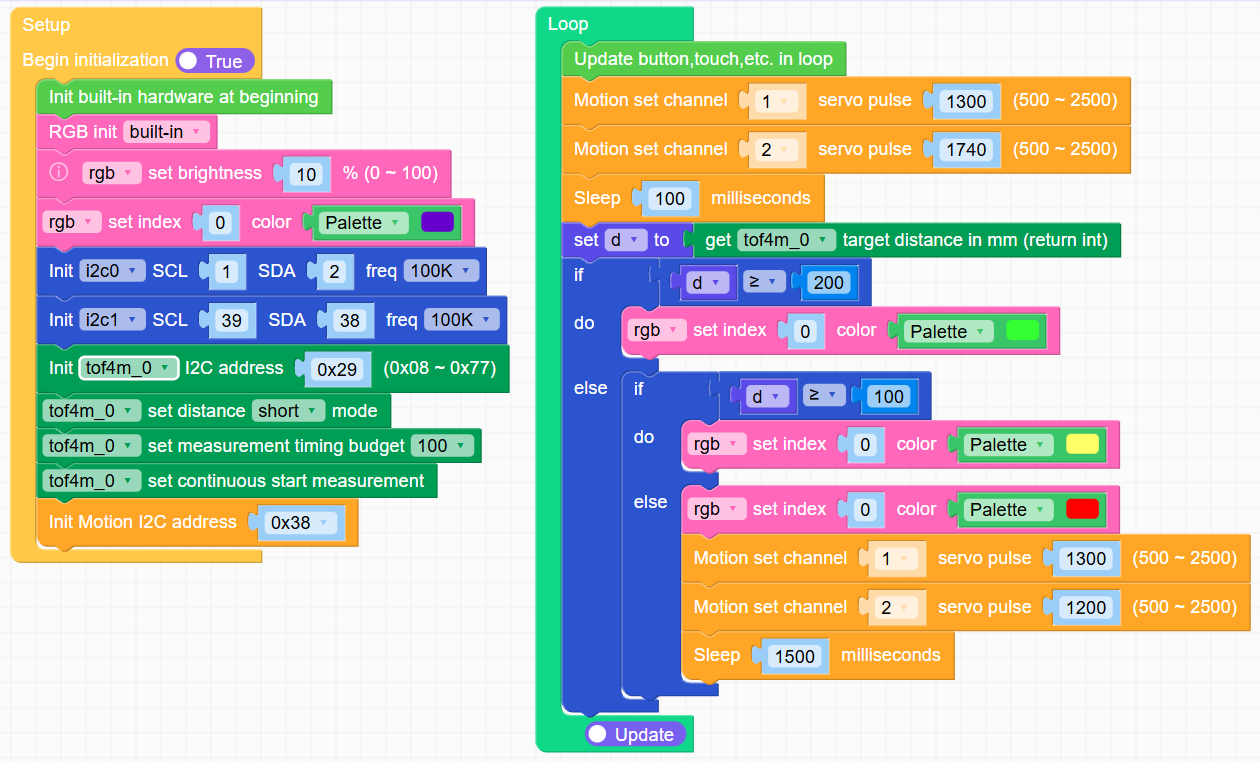
Next was the servo setup, two 360 servos connected to the motion base. It took some time to figure it out. Angle at 90 means stop, pulse at 1500 means stop. I would have expected that the same value means the same speed, but with pulse 1300 and 1700 it was always not going straight. I would have expected that servos can handle this better.
Finally the ToF4M was added to the code, to turn before getting to close to an object. Sometimes it works, sometimes it doesn't, I am not sure what the issue is, maybe the sensor needs more stable power than the 18350 battery can supply.
Overall it was a unpleasent experience. Atom challanges, servos not going reliably straight, ToF not always working, it was a bit disappointing. Happy to get any kind of constructive feedback, how to improve the situation.